
新能源汽車,現在大都在朝車聯網的方向發展。比起傳統汽車,新能源汽車最大的變化除了能源之外,還有智能這一塊。要說新能源汽車最智能的地方,莫過於無人駕駛技術。
無人駕駛技術現在的發展還並不完善,但是很多汽車都已經具備了L2級別的無人駕駛功能。通過無人駕駛,車主的驅車操作減少了很多,大部分交由人工智慧完成。雖然車主的手仍然無法離開方向盤,但相較於傳統的駕駛模式,已經方便了很多。
無人駕駛這一過程大致由攝像頭和GPS來確定路線和路況,然後再通過傳感器和智能作業系統來完成反應和駕駛。聽上去似乎很簡單,但實際上卻非常難。不過,如果能突破無人駕駛技術,對於汽車駕駛來說是具有重大意義的。因為從理論上來說,無人駕駛通過智能實現,其判斷能力和反應能力都比人類要出色得多。真正的無人駕駛不僅能夠幫助車主實現更好的駕駛體驗,還能在一定程度幫助車主規避很多危險。

展開全文
無人駕駛的等級大概有五個,現在才能實現第二個等級。大多數人認為只有到L4、L5這個等級,才能被稱之為真正的無人駕駛。甚至還有人認為完全的無人駕駛永遠不可能實現。不管關於無人駕駛的最終未來會如何,如今的無人駕駛技術已經在中美的競爭下發展出了不同的技術方向。隨著無人駕駛技術的不斷完善,相信在未來,我們真的能體驗科幻電影中那些神奇的無人駕駛。

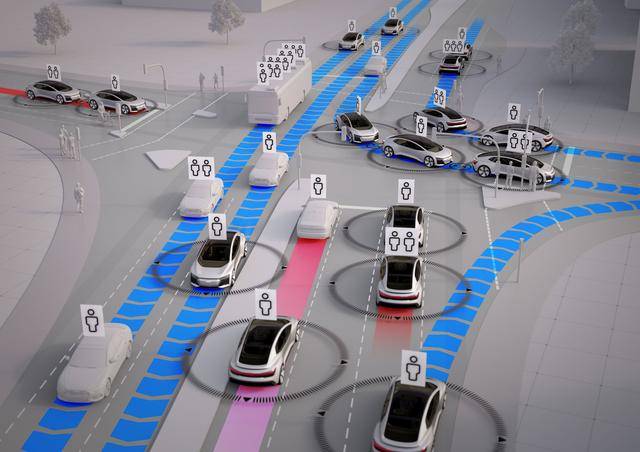
在中國,無人駕駛的方向走向了車路協同,也就是無人駕駛不僅依賴到車里的智能系統,還依賴道路的配合。怎麼做到呢?很簡單,那就是在道路中安裝傳感器來接受信號,通過5G信號的高效傳播將道路信息很快地反饋給車輛的信號接受裝置,然後車輛再結合自身的智能系統完成無人駕駛。

我國這種車路協同的方式有什麼好處呢?首先它比傳統的無人駕駛更加全面,傳統理念的無人駕駛依然停留在以車輛為中心,一切信號接受,識別和處理能力都交給了車子,這樣對於車的壓力就非常大,要求車的智能系統和晶片的能力特別強。而車路協同,有道路的反饋輔助,對於車輛的智能系統要求大大降低,不僅提高了穩定性,安全性,對於汽車的成本也有一定的削減。

我國走上了車路協同的發展道路,而老美則走上了單車智能的道路。所謂單車智能,就是將所有的功能都寄託給車輛,讓車輛來模仿人類的駕駛行為。具體過程大概是通過傳感器觀察周圍的路況,然後根據具體情況進行分析和決策,最後做出相應的駕駛活動。這個過程具體為感知、決策和控制。這種方向因為將所有的壓力全部都加在了汽車身上,所以車輛需要更強大的處理能力和更高級的作業系統。這將大大增加車輛的成本。不過好處在於,這樣的智能汽車在性能方面無疑會更優秀,技術更加發達。

兩種技術發展道路,目前還是車路協同更具有優勢,相較於單車智能來說,車路協同的安全性更高。因為單憑借車輛自身攜帶的傳感器很難完全分析路況,尤其是拐彎或者遮擋物背後,傳感器是難以觀測的。在人多的地方,其風險就會大很多,但是車路協同,有道路的輔助,車載傳感器觀測不到的,道路自身可以觀測到,安全性方面高的太多的。

此外,車路協同,更有利於擁堵路段的疏通和通暢,因為車路協同,車輛和道路形成了一個立體網絡。根據這個網絡,控制中心可以對車輛的行駛發出指令和調控,這樣在擁堵地帶,這個網絡可以以最高效率規劃汽車的通行,防止出現大規模擁堵現象。從這個角度來說,車路協同對於城市的交通管理和物流的效率將會有一個大的提升。

總體來看,單車智能目前對於技術的要求過高,尤其是L5級別的無人駕駛,很可能難以實現。所以車路協同更符合現在的需求,也更安全,更有效率。當然了,我們也不是說單車智能就沒有優點,車路協同就沒有缺點。車路協同的缺點在於,前期需要投入大量的基建在道路上,對於基建的要求非常高,當然了這對於我國而言反而是優勢不是缺點了。

總結而言,目前車路協同更具優勢,而且代表著未來的方向,因為單車智能再發展也不可能完全真正地脫離無人駕駛,很多專家都表示不可能實現真正的無人駕駛,所以最終我們還是要回歸到車路協同,做車輛和的道路的網絡。
作筆記是好習慣,給你新想法